Project Details
Abstract
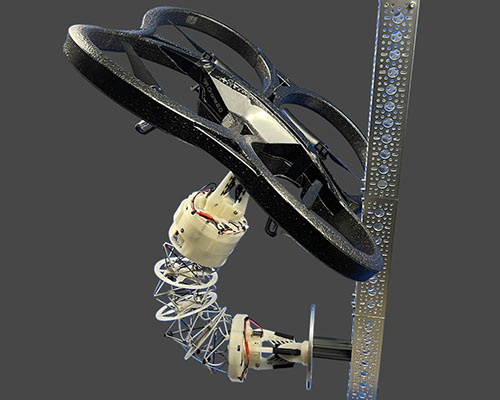 Uncrewed Aerial Systems (UAS) hold promise for revolutionizing the inspection of transportation infrastructure by enabling rapid and safe assessments. However, the application of UAS is predominantly limited to detecting surface-level defects, such as visible cracks, due to the reliance on vision sensors. This approach inherently misses subsurface damage, which, to date, requires direct contact-based methods (e.g., ultrasonic, magnetic, and radiographic techniques) that are currently carried out by manual inspection. This project aims to preliminarily investigate a transformative approach to infrastructure inspection by developing an integrated UAS platform equipped with a continuum robotic arm for contact-based inspection. The project will also conduct a preliminary evaluation of sensors suitable for contact-based infrastructure inspection, providing a basis for future sensor integration efforts. This proposed system aims to establish a foundational approach for future developments in multimodal and autonomous infrastructure inspection, advancing the field by overcoming current limitations in damage assessment capabilities.
Uncrewed Aerial Systems (UAS) hold promise for revolutionizing the inspection of transportation infrastructure by enabling rapid and safe assessments. However, the application of UAS is predominantly limited to detecting surface-level defects, such as visible cracks, due to the reliance on vision sensors. This approach inherently misses subsurface damage, which, to date, requires direct contact-based methods (e.g., ultrasonic, magnetic, and radiographic techniques) that are currently carried out by manual inspection. This project aims to preliminarily investigate a transformative approach to infrastructure inspection by developing an integrated UAS platform equipped with a continuum robotic arm for contact-based inspection. The project will also conduct a preliminary evaluation of sensors suitable for contact-based infrastructure inspection, providing a basis for future sensor integration efforts. This proposed system aims to establish a foundational approach for future developments in multimodal and autonomous infrastructure inspection, advancing the field by overcoming current limitations in damage assessment capabilities.
Project Word Files
project files
- UTC Project Information (Word, 86K)
Note to project PIs: The UTC document is limited to two pages. Also, it would be helpful if the Track Changes feature is used when editing either document above. Updated documents should be emailed to ndsu.ugpti@ndsu.edu.