Project Details
Abstract
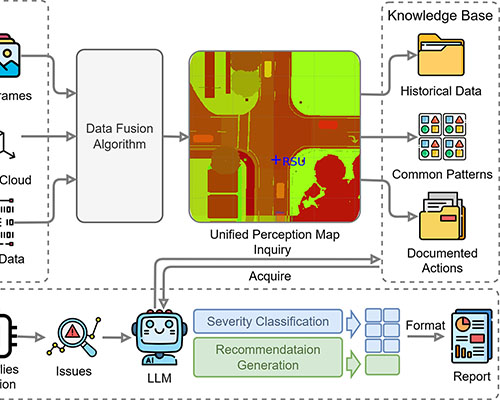 This research proposes the development of a CAV-based Proactive Infrastructure Preserving (CAV-PIP) system to enhance the safety, resilience, and operational efficiency of transportation infrastructure. The system leverages the sensing and communication capabilities of connected autonomous vehicles (CAVs) to enable continuous, real-time detection and reporting of roadway anomalies, such as pavement distress and damaged traffic signage. By fusing multi-modal sensor data and incorporating a retrieval-augmented generation (RAG) framework with large language models (LLMs), the system constructs a dynamic prior knowledge base to reason about infrastructure conditions and recommend context-aware maintenance actions. The project aims to transform current reactive maintenance practices into a data-driven, proactive framework that improves decision-making for transportation agencies. The system will be validated through simulation in the CARLA (Car Learning to Act) environment and supported by curated real-world datasets. Expected outcomes include an integrated detection and reasoning framework, structured maintenance reporting tools, and publicly shareable datasets and software packages. The project’s broader impact lies in advancing intelligent infrastructure monitoring technologies, reducing long-term maintenance costs, and contributing to safer and more sustainable transportation systems.
This research proposes the development of a CAV-based Proactive Infrastructure Preserving (CAV-PIP) system to enhance the safety, resilience, and operational efficiency of transportation infrastructure. The system leverages the sensing and communication capabilities of connected autonomous vehicles (CAVs) to enable continuous, real-time detection and reporting of roadway anomalies, such as pavement distress and damaged traffic signage. By fusing multi-modal sensor data and incorporating a retrieval-augmented generation (RAG) framework with large language models (LLMs), the system constructs a dynamic prior knowledge base to reason about infrastructure conditions and recommend context-aware maintenance actions. The project aims to transform current reactive maintenance practices into a data-driven, proactive framework that improves decision-making for transportation agencies. The system will be validated through simulation in the CARLA (Car Learning to Act) environment and supported by curated real-world datasets. Expected outcomes include an integrated detection and reasoning framework, structured maintenance reporting tools, and publicly shareable datasets and software packages. The project’s broader impact lies in advancing intelligent infrastructure monitoring technologies, reducing long-term maintenance costs, and contributing to safer and more sustainable transportation systems.
Project Word Files
project files
- UTC Project Information (Word, 87K)
Note to project PIs: The UTC document is limited to two pages. Also, it would be helpful if the Track Changes feature is used when editing either document above. Updated documents should be emailed to ndsu.ugpti@ndsu.edu.